





Тема 1.2. Система автоматического регулирования
Вопросы:
1. Классификация систем автоматического регулирования.
2. Состав САР - устройство обратной связи, устройство
сравнения, исполнительный механизм, управления.
3. Управляющее и возмущающее воздействия на объект
управления.
4. Основные показатели качества работы систем
автоматического регулирования.
5. Типовые законы автоматического регулирования.
6. Устойчивость систем автоматического регулирования.
Вопрос 1. Классификация систем автоматического регулирования
Классификация по характеру изменения величин:
1. Системы непрерывного действия
2. Системы импульсного действия (AM, ФМ, ЧМ, ШИМ, ЧИМ, ...)
3. Системы дискретного действия (01001011110101100010101)
4. Системы релейного действия
Классификация по математическим признакам:
1. Линейные системы
2. Нелинейные системы
3. Существенно нелинейные
Классификация по способу настройки:
1. Не адаптивные системы
2. Адаптивные системы
o Системы с самонастройкой программы
o Системы с самонастройкой параметров
o Системы с переменной структурой
o Системы с самонастройкой структуры
Классификация по типу ошибки в статике:
1. Статические САУ
2. Астатические САУ
Классификация по алгоритмам функционирования (по назначению):
1. Системы стабилизации
2. Системы слежения
3. Системы программного управления
4. Системы телеуправления
5. Системы самонаведения (снаряда), сопровождения (орудия), автопилотирования
6. Системы компенсационных измерений
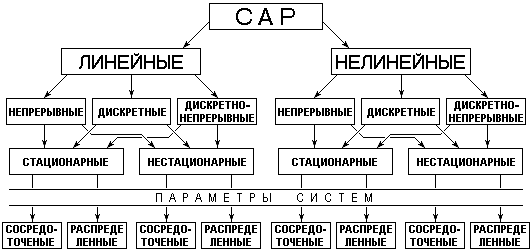
1.6. Классификация систем автоматического управления
1.6.1. Классификация систем автоматического регулирования по характеру изменения задающего воздействия
По данному признаку САУ делятся на:
- системы автоматической стабилизации;
- системы программного управления;
- следящие системы.
Система автоматической стабилизации – это система, алгоритм функционирования которой содержит предписание поддерживать значение управляемой величины постоянной:
означает, что управляемая переменная поддерживается на заданном уровне с некоторой ошибкойгде знак
Системы автоматической стабилизации имеют наибольшее распространение в промышленной автоматике.
Система программного управления – это система, алгоритм функционирования которой содержит предписание изменять управляемую переменную в соответствии с заранее заданной функцией времени fn(t), т.е.
Следящая система – это система, предназначенная для изменения управляемой переменной в соответствии с изменением другой переменной, которая действует на входе системы и закон изменения которой заранее не известен, т.е. где fc(t) – произвольная функция времени.
Следящие системы обычно используются для дистанционного управления перемещением объектов в пространстве, а также для дистанционной передачи показаний.
1.6.2. Классификация систем автоматического управления в зависимости от числа управляе-мых переменных
По этому признаку САУ делятся на одномерные и многомерные.
К одномерным САУ (САР) относятся системы с одним входом и одним выходом.
К многомерным САУ относятся системы с несколькими выходами и (или) несколькими входами.
Многомерные системы, в свою очередь, делятся на системы связанного и несвязанного управления. Системы несвязанного управления (регулирования) – это системы, в которых устройства управления, предназначенные для управления различными переменными, не связаны друг с другом и могут взаимодействовать только через общий объект управления.
Системы связанного управления – это системы, в которых устройства управления связаны между собой и для нормальной работы системы требуется их вполне определенное взаимодействие.
1.6.3. Классификация систем автоматического управления по остальным признакам.
По виду сигналов, циркулирующих в системе, САУ делятся на непрерывные (аналоговые) и дискретные системы управления. Дискретные системы, в свою очередь делятся на импульсные, релейные и цифровые.
В зависимости от наличия ошибки в установившемся режиме САР делятся на:
- статические системы, в которых управляемая переменная в установившемся режиме зависит от величины возмущающих воздействий (управляющего воздействия или входных переменных);
- астатические системы, в которых управляемая переменная не зависит в установившемся режиме от величины возмущающего воздействия.
По виду дифференциальных уравнений, описывающих элементы САУ, последние делятся на линейные и нелинейные системы. Линейные САУ – это системы, все элементы которых описываются линейными алгебраическими и дифференциальными уравнениями. Если хотя бы один элемент системы имеет нелинейную зависимость выходной переменной от входной, то такая система является нелинейной.
Вследствие большого разнообразия используемых в технике систем автоматического регулирования, различающихся функциональными возможностями, принципами построения и формой конструктивной реализации, невозможно дать единую классификацию систем автоматического регулирования. Поэтому рассмотрим наиболее характерные классификационные признаки.
Первый признак - наличие в системе явно выраженной обратной связи. По этому признаку системы разделяют на разомкнутые и замкнутые. В разомкнутых системах ОСГ отсутствует. Системы, работающие по разомкнутому циклу, используют только в качестве составной части более сложных систем автоматического регулирования.
Описание функциональной схемы разомкнутой САР: Задающее устройство вырабатывает задающее воздействие g, в соответствии, с которым устанавливается управляющее воздействие U. Управляющим называется воздействие, которое вырабатывает исполнительное устройство (исполнительный элемент). Это воздействие поступает на объект управления и определяет значение выходной величины. На объект управления кроме управляющего всегда действует другое воздействие, называемое возмущающим. Возмущающих воздействий может быть несколько. Возмущающее воздействие нарушает связь между управляющим воздействием и выходной величиной объекта. При постоянном задающем воздействии g изменение возмущающего воздействия F вызывает изменение выходной величины Y.
Достоинства системы:
1) Простота
2) Малая инерционность
3) Быстродействие системы
Недостатки:
1) Управление осуществляется без контроля результата.
Замкнутые системы содержат цепь обратной связи ОСГ. Под главной обратной связью понимают подачу части энергии с выхода системы на её вход. Главная обратная связь (ОСГ) служит для сравнения действительного закона изменения регулируемого параметра с требуемым. Помимо главной обратной связи в системе предусмотрены местные обратные связи для улучшения динамических свойств системы. Местная обратная связь охватывает один или несколько элементов основной цепи. сигнал вычитается из основного сигнала.
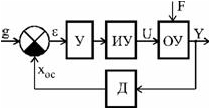
Замкнутая система регулирования
У - усилитель; ИУ - исполнительное устройство; g - задающее воздействие; U - управляющее воздействие; Д – датчик; Y - выходная величина; F - возмущающее воздействие; Хос - сигнал обратной связи;ε – отклонение.
Достоинства:
1) Выработка регулирующего воздействия в независимости от возмущающего фактора
2) Учёт действительного параметра и оценка ошибки
Недостатки:
1) Наличие ошибки регулирования
2) Малое быстродействие
3) Склонность системы к перерегулированию
Второй признак - закон изменения регулируемой величины в системах автоматического регулирования. По этому признаку системы принято делить на системы стабилизации, программного регулирования и следящие. Стабилизирующей - называют систему, алгоритм управления которой содержит предписание поддерживать регулируемую величину на постоянном значении. Программной - называют систему, алгоритм управления которой содержит предписание изменять регулируемую величину в соответствии с заранее заданной функцией. Изменение регулируемой величины обеспечивается изменением задающего воздействия по строго определенной программе. Следящей - называют систему, алгоритм управления которой содержит предписание изменять регулируемую величину в зависимости от неизвестной заранее переменной величины на входе автоматической системы. В следящих системах регулируемое воздействие повторяет в определенном масштабе все изменения управляющей величины, т.е. следит за ней.

стабилизирующие системы
Третий признак - способность системы автоматического регулирования поддерживать с определённой степенью точности значение регулируемой величины. По этому признаку системы разделяют на статические и астатические. Статической системой автоматического регулирования называют такую систему, в которой принципиально не возможно поддерживать одно и то же значение регулируемого параметра при условии, что задающее воздействие системы остаётся неизменным. Остаточную ошибку в такой системе называется статизмом. Астатической системой автоматического регулирования называют такую систему, в которой в установившемся режиме регулируемый параметр принимает всегда одно и то же значение и не зависит от значения возмущающего воздействия на объект регулирования. В астатической системе статизм всегда равен нулю.
Четвёртый признак - функциональная связь между входным и выходным величинами элементов, входящих в состав системы автоматического регулирования. По этому признаку системы подразделяют на непрерывные и дискретные. Непрерывной системой автоматического регулирования называют систему, в которой непрерывному изменению входных величин элементов соответствует непрерывное изменение выходных величин этих элементов. Дискретной системой автоматического регулирования называют систему, в которой непрерывному изменению входной величины хотя бы одного элемента, входящего в состав системы, соответствует дискретное изменение выходной величины этого элемента.

Непрерывные системы

Дискретные системы
Вопрос 2. Состав САР - устройство обратной связи, устройство сравнения, исполнительный механизм, управления
(САР) применяется для автоматизации производственных процессов.
Автоматические системы могут быть комбинированными т.е. состоять из нескольких систем.
САР состоит из системы автоматического контроля и управления.
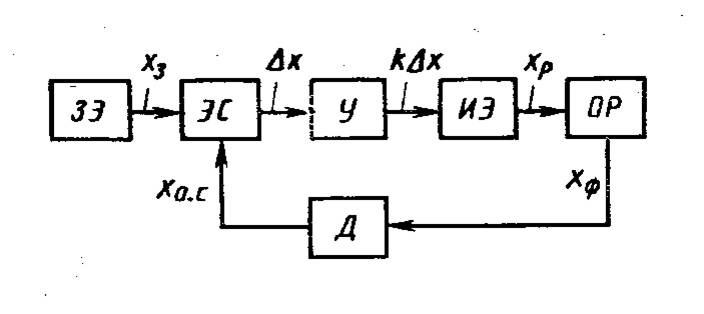
ЗЭ - задающий элемент
ЭС - элемент сравнения
У - усилитель
Д - датчик
ИЭ - исполнительный элемент
Автоматическое регулирования осуществляется при наличии современных автоматических средств.
К ним относятся: датчики, преобразователи, усилители, задающие устройства, исполнительные органы и т.д.
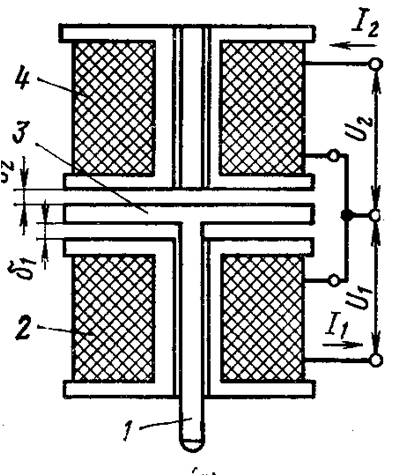
Схема электроконтактного датчика – путевого выключения Схема индуктивного датчика – с подвижным сердечником
Преобразующие устройства служат для преобразования сигналов к виду удобному для их последующей обработке.
К ним относятся: реле времени, реле счётов импульсов, дешифраторы, реле с герконом.
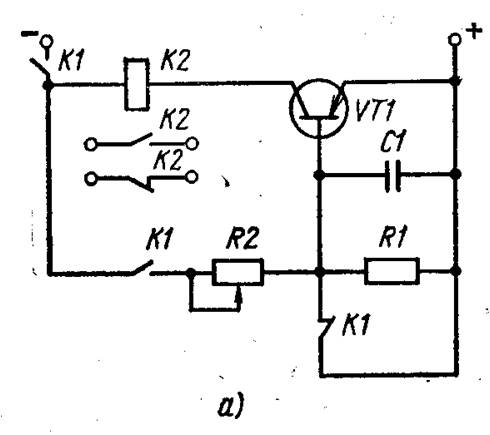
Схема реле времени
Вопрос 3. Управляющее и возмущающее воздействия на объект управления
Вопрос 4. Основные показатели качества работы систем автоматического регулирования
Вопрос 5. Типовые законы автоматического регулирования
В системах автоматического регулирования поддержание заданного значения регулируемого параметра или изменение его по определенному закону обеспечивается аппаратурными средствами, имеющие общее название – автоматические регуляторы.
По виду регулируемого параметра автоматические регуляторы подразделяются на регуляторы температуры, давления, влажности, разряжения, расхода, состава и т. п.
По характеру изменения регулирующего воздействия автоматические регуляторы подразделяются на регуляторы с линейными и нелинейными законами регулирования.
Примером регуляторов с нелинейным законом регулирования могут служить двухпозиционные регуляторы температуры в холодильных машинах. В трехпозиционных дискретных системах выходной сигнал может принимать три значения: –1, 0, +1, т.е. "меньше”, "норма”, больше”. Качество работы таких САР выше, хотя их надежность ниже.
Регуляторы с линейным законом регулирования по математической зависимости между входными и выходными сигналами подразделяются на следующие основные виды:
• пропорциональные (П-регуляторы);
• пропорционально-интегральные (ПИ-регуляторы);
• пропорционально-интегрально-дифференциальные (ПИД-регуляторы).
В зависимости от вида используемой энергии регуляторы подразделяются на электрические (электромеханические, электронные), пневматические, гидравлические и комбинированные.
В СКВ в основном применяются электрические регуляторы. Пневматические и гидравлические регуляторы, как правило, применяются во взрыво- и пожароопасных зонах.
В зависимости от задающего воздействия и параметров объекта регулирования подбирают регулятор с определенной характеристикой Wр [1]. Изменение Wр адекватно ведет к изменению коэффициентов дифференциального уравнения общего передаточного звена (регулятор-объект) и тем самым достигается необходимое качество регулирования. В промышленных регуляторах эти величины называются параметрами настройки. Параметрами настройки являются: коэффициент усиления, зона нечувствительности, постоянная времени интегрирования, постоянная времени дифференцирования и т. д. Для изменения параметров настройки в регуляторах имеются органы настройки (управления).
Кроме органов настройки основных параметров, регуляторы имеют также органы настройки, косвенно влияющие на эти коэффициенты или режимы его работы, например, органы настройки, изменяющие чувствительность регулятора, демпфирование входного сигнала и др.
Пропорциональные регуляторы
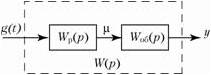
Обобщенная структурная схема САР представлена на рис. 1.
а б
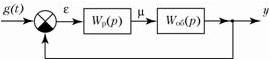
Рис. 1 Структурная схема САР: а – разомкнутой системы по каналу задающего воздействия; б – то же, но замкнутой системы
Для системы регулирования, показанной на рис. 1, ее амплитудно-фазовая характеристика (АФХ) определяется выражением
W(jω) = Wp(jω) · Wоб(jω), (1.1)
где Wp(jω) – АФХ регулятора;
Wоб(jω) – АФХ объекта регулирования.
Если комплексная частотная характеристика регулятора будет
Wp(jω) = kp, (1.2)
то АФХ всей системы запишется в виде
W (jω) = kp · Wоб(jω). (1.3)
Следовательно, при подключении к объекту регулятора с АФХ (1.2) АФХ системы на каждой частоте увеличивается в kp раз.
Такие регуляторы называются пропорциональными (П-регуляторы) и имеют один параметр настройки – коэффициент передачи kp.
Переходные процессы в П-регуляторе описываются выражением
μ = kp · ε, (1.4)
где ε – входное воздействие на регулятор, равное отклонению регулируемой величины от заданного значения;
μ – воздействие регулятора на объект, направленное на ликвидацию отклонения регулируемой величины от заданного значения.
На рис. 2 приведен пример контура регулирования температуры приточного воздуха в канальном кондиционере. Температура воздуха поддерживается водяным калорифером, через который пропускается теплоноситель. Воздух, проходя через калорифер, нагревается. Температура воздуха после водяного калорифера измеряется датчиком (Т), далее эта величина поступает на устройство сравнения (УС) измеренного значения температуры (Тизм) и заданного (Tзад). В зависимости от разности между температурой уставки и измеренным значением температуры регулятор (Р) вырабатывает сигнал, воздействующий на исполнительный механизм (М – электропривод трехходового клапана). Электропривод открывает или закрывает трехходовой клапан до положения, при котором ошибка ε = Tзад – Тизм будет стремиться к нулю.
Выходным сигналом регулятора может быть напряжение в определенном диапазоне (например, постоянное напряжение в диапазоне от 0 до 10 В, ток 0–20мА и т. д).
Диапазон изменения выходного сигнала называется диапазоном регулирования (рис.3). Диапазон изменения сигнала ошибки называют пропорциональным диапазоном.
В П-регуляторах имеется возможность изменять диапазон регулирования и пропорциональный диапазон.
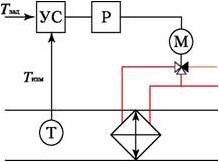 Рис.3 Контур регулирования температуры приточного воздуха в канале центрального кондиционера | 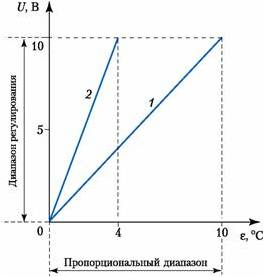 Рис.4 График пропорционального регулирования |
Из графика (рис.4) видно, что чем меньше пропорциональный диапазон, тем круче характеристика регулирования. Кривая (1) соответствует диапазону изменения температуры 0–10 °С, а кривая (2) – диапазону 0–4°С.
Величина kp =∆U/ε есть коэффициент регулирования. В первом случае kp = 1, а во втором kp = 2,5.
При больших значениях kp в контуре регулирования могут возникнуть колебания (рис.5). Так, если во время включения системы температура воздуха Тизм ниже заданной температуры Tзад, устройство управления выдает большой сигнал на открытие трехходового клапана. Температура водяного калорифера и приточного воздуха начнет повышаться.
Когда температура приточного воздуха после водяного калорифера достигает Tзад, устройство управления выдает команду на закрытие трехходового клапана (точка t1, рис. 5).
Однако из-за того, что калорифер разогрет, температура приточного воздуха до момента t2 еще будет расти, а затем начнет снижаться. Этот процесс имеет вид затухающих колебаний, и через определенное время (t3) процесс стабилизируется.
После стабилизации из-за инерционности системы всегда будет существовать статическая ошибка Δст = Tзад – Тизм.
Сигнал на выходе устройства управления будет иметь вид
y(t) = Uo + kp · ε, (1.5)
где Uo – сигнал на выходе устройства управления при ε = 0.

Рис.5 Переходной процесс при пропорциональном (П) регулировании
Чем большим выбран пропорциональный диапазон регулирования, тем большей будет величина статистической ошибки. При малой величине пропорционального диапазона увеличивается время переходных процессов, и при некоторых условиях может возникнуть автоколебательный (незатухающий) процесс в контуре регулирования.
Путем выбора параметров регулирования П-регулятора можно существенно уменьшить установившуюся ошибку регулирования, однако ее полное устранение непредставляется возможным даже теоретически.
Из рис.3 видно, что в цепочке регулирования в реальном регуляторе установлено еще одно звено – исполнительный механизм (М). В данном случае – это электродвигатель привода трехходового клапана. Электрический привод является интегрирующим звеном иего влияние по возможности уменьшают, используя обратные связи. Это связано с тем, что динамические свойства участка, охваченного обратной связью, независят от динамических свойств прямого участка, а определяются в основном динамическими свойствами звена обратной связи. Эта особенность широко используется напрактике при разработке автоматических регуляторов.
Исходя из этого, для устранения влияния исполнительного механизма его необходимо охватить отрицательной обратной связью. Для повышения коэффициента передачи прямого канала отрицательной обратной связью нужно охватить и усилительное звено регулятора. Такие П-регуляторы, называемые позиционерами, можно представить в виде последовательного соединения собственно П-регулятора и некоторого балластного звена с постоянной времени Тб.
На рис. 6 представлена структурная схема П-регулятора, а на рис. 7 – реализуемый ею закон регулирования.
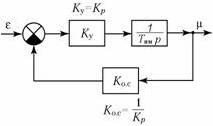 Рис.6 Структурная схема П-регулятора | 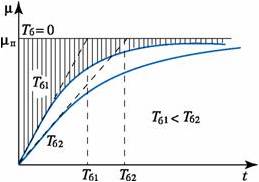 Рис.7 Закон П-регулирования |
Параметром настройки регулятора является коэффициент передачи устройства обратной связи kос. Коэффициент передачи регулятора kп тем больше, чем меньше kос. Однако следует иметь в виду, что чем больше kп, тем больше постоянная времени балластного звена и тем больше искажается идеальный закон П-регулирования.
Пропорционально-интегральные регуляторы
Статическую ошибку, возникающую при пропорциональном регулировании, можно исключить, если кроме пропорционального ввести еще и интегральное звено. Последнее образуется путем постоянного суммирования ε за определенный промежуток времени иформирования сигнала управления, пропорционального полученной величине.
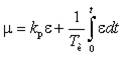
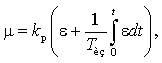
Математически этот процесс может быть описан следующей зависимостью:
 , (1.6)
, (1.6)где kи=1/Ти – коэффициент пропорциональности интегральной составляющей, а Ти - постоянная времени интегрирования, параметр настройки регулятора.
Если kи ≠ 0, то даже при незначительных отклонениях регулируемой величины сигнал со временем может достичь любой величины, что приведет к перемещению регулирующего органа до момента, пока ε не станет равным 0.
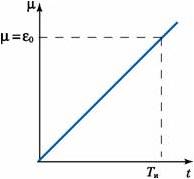
Рассмотрим физический смысл постоянной времени интегрирования. Предположим, что на вход регулятора поступил сигнал ε = εo, а пропорциональная составляющая отсутствует (kп = 0). При этом выходной сигнал в соответствии (1.6) будет меняться по закону μ = εo · t/Tи. По истечении времени t = Tи значение выходного сигнала будет равно μ = ε0 (рис.8, а).
Таким образом, постоянная времени интегрирования в И-регуляторе равна времени, в течение которого с момента поступления на вход регулятора постоянного сигнала сигнал на выходе регулятора достигнет значения, равного значению входного сигнала.
Переходной процесс в И-регуляторе показан на рис.8, б. Устраняя статическую ошибку интегральный регулятор, однако, ухудшает качество переходного процесса. Поэтому на практике применяют комбинированные ПИ-регуляторы.
 a | 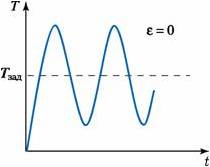 б |
Рис.8 Закон регулирования (а) и переходной процесс (б) при интегральном (И) регулировании
При этом используется как параллельное соединение пропорционального и интегрального звена (рис.8, а), так и последовательного (рис.8, б).
ПИ-регулятор оказывает воздействие на регулирующий орган пропорционально отклонению и интегралу от отклонения регулируемой величины.
 (1.7)
(1.7)Передаточная функция ПИ-регулятора (по схеме, рис.8, а):
Wпи(р) = kp+ (1.8)
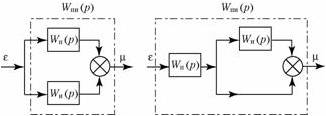 Рис.9. Структурная схема идеальныхПИ-регуляторов: а – с передаточной функцией (1.8);б – с передаточной функцией (1.10) | 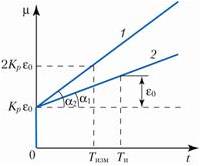 Рис.10. Закон ПИ-регулирования регуляторов 1 – спередаточной функцией (1.8) 2 – с передаточной функцией (1.10) |
При скачкообразном изменении регулируемой величины на значение εo ПИ-регулятор со скоростью, определяемой быстродействием привода, перемещает исполнительный механизм на величину (kp · εo), после чего исполнительный механизм дополнительно перемещается в ту же сторону со скоростью εo/Ти, пропорциональной отклонению регулируемой величины. Следовательно, в ПИ-регуляторе при отклонении регулируемой величины от заданного значения мгновенно срабатывает пропорциональная (статическая) составляющая регулятора, а затем постепенно увеличивается интегральная (астатическая) составляющая регулятора.
Переходная характеристика ПИ-регулятора с передаточной функцией (1.8) показана на рис.10 (прямая 1).
Параметрами настойки являются независящие друг от друга коэффициенты усиления kp и постоянная времени интегрирования Ти.
Схема на рис.9, б реализует закон регулирования
 (1.9)
(1.9)где Тиз – постоянная времени изодрома.
Передаточная функция ПИ-регулятора по схеме рис.9,б:
Wпи(р) =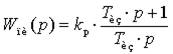 (1.10)
(1.10)
(1.10)Таким образом, ПИ-регулятор со структурной схемой, приведенной на рис.9, б, имеет взаимосвязанные параметры настройки статической и астатической частей по коэффициенту kp. Так, при настройке коэффициента усиления kp будет изменяться и постоянная времени интегрирования:
 (1.11)
(1.11)Рассмотрим физический смысл постоянной времени изодрома Тиз. Предположим, что на вход регулятора поступил постоянный сигнал εo. Тогда выражение (1.9) преобразуется к виду
μ = kp εo(1+t/T) (1.12)
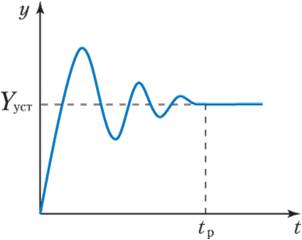
Рис.11. Переходной процесс при пропорционально-интегральном (ПИ) регулирова
