





Действие размерных датчиков или измерительных головок основано на измерении линейного размера детали (диаметра, длины, высоты, толщины) контактным и бесконтактным методами. В размерных датчиках определяется расстояние между фиксированной поверхностью или точкой и поверхностью датчика, находящейся в определенном положении по отношению к датчику.
Наибольшее применение нашли электроконтактные, индуктивные, емкостные, пневматические, пневмо- и фотоэлектрические датчики. Когда требуется определить овальность, эксцентриситет и другие отклонения от заданной формы, применяют амплитудные датчики.
Электроконтактные размерные датчики. Они являются датчиками перемещений, как и путевые, но в отличие от них размерные должны улавливать очень малые перемещения из мерительных штоков и обладать очень высокой чувствительностью. Поэтому в конструкциях размерных датчиков широко используют рычажно-пружинные передачи взамен шарнирных или рычажно-зубчатых передач. В рычажно-пружинных передачах нет зазоров и трения в соединениях деталей, не происходит изменение размеров в таких парах вследствие износа и потому не изменяются первоначальные сопряжения поверхностей деталей передачи. Плоские пружины выполняют функции шарниров и осей. Все это приводит к повышению надежности и точности работы в процессе эксплуатации.
Все движущиеся части рычага подвешивают на плоских пружинах, закрепленных иногда крестообразно. Изготовление крестообразных подвесов трудоемко, но они надежны в работе. В большинстве конструкций датчиков предусмотрено посадочное гнездо для присоединения шкального прибора визуального контроля. Пределы измерений 0—2,5 мм, предельная погрешность до ±0,3 мкм.
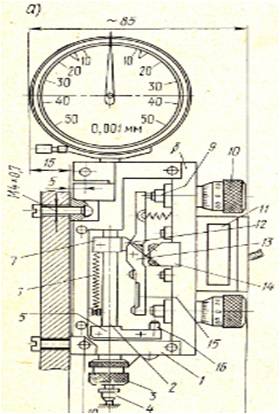
Рис. 7.9. Электроконтактные датчики
Двухпредельный электроконтактный датчик рычажного типа показан на рис. 7.9, а. Измерительный шток 2 перемещается в цилиндрических втулках, запрессованных в корпусе 1. На шток надевают наконечник 4 для контактирования с измеряемой деталью. Сверху в корпусе имеется отверстие и винт для зажима отсчетной головки, наконечник которой упирается в верхний конец измерительного штока 2. Для перемещения штока при настройке датчика по отсчетной головке имеется гайка микроподачи 3. Измерительное усилие на штоке в 2,5—3,5 Н создается пружиной 6, надетой на винт хомутика 7. Второй хомутик 5, также закрепленный на штоке, имеет паз, где располагается запрессованный в корпус 1 штифт 16, служащий для предохранения штока от поворотов. На стенке 8 располагается передаточный и настроечный механизм датчика. К колодке 14 на крестообразном пружинном шарнире подвешен рычаг 13 с плечами 511, несущий подвижные контакты. В рычаге 13 запрессован корундовый штифт 12, на который воздействует твердосплавный конец хомутика 7. Нижний подвижный контакт подвешен к рычагу 13 на плоской пружине 15. Настроечные контакты запрессованы в концы регулируемых микрометрических винтов 9, несущих барабаны 10 с ценой деления 0,002 мм. Контакты датчика имеют независимые выводы к штырям, служащие для присоединения тс розетке 11. Корпус закрыт с двух сторон крышками из органического стекла. При движении штока 2 вниз размыкается верхний контакт. Когда шток 2 опустится на определенный размер, то замкнется нижний контакт. Предел измерения датчика I мм, свободный ход измерительного штока 4 мм, предельная погрешность ± 1 мкм.
Для контроля погрешностей геометрической формы детали применяют электроконтактные амплитудные датчики (рис. 7.9, б). В корпусе перемещается шток 2, оснащенный съемным наконечником. Сверху в корпусе имеется отверстие и зажим для крепления отсчетной головки, наконечник которой упирается в верхний конец штока. Пружина 3 создает натяжение штока усилием в 1,2—1.4 Н.

На штоке 2 закреплена опорная часть кронштейна с насаженной фрикционной планкой 1. При движении штока вниз планка 1 перемещается около сектора 5 без скольжения, пока подвижный контакт, закрепленный на передаточном рычаге 5, не упрется в контакт 4. При дальнейшем опускании штока планка 1 проскальзывает по сектору 5, рычаг 6 остается неподвижным. Когда шток пройдет одно из экстремальных расстояний относительно измеряемой поверхности, он начнет обратное движение, увлекая за собой рычаг 6 с контактами. Если колебания размера (погрешность формы) превысят допустимую величину, то второй контакт рычага 6 коснется второго неподвижного контакта 7, подавая сигнал о браке. Положение контактов регулируется по лимбу настроечного барабана с ценой деления 0,002 мм. Настройка датчики на предельную величину амплитуды колебаний (0—0,2 мм) производится по отсчетной головке либо по эталонной детали. Свободный ход штока до 3 мм, предельная погрешность ±0,5 мкм. Планка 1 и сектор 5 выполнены из бронзы. Рычаг 6 подношен не плоских крестообразных пружинах. Такая фрикционная система отличается постоянством передаточного отношения на всем пределе измерения и поэтому не снижает точности работы датчиков, аналогичных описанному, при изменениях размеров детали в пределах до 1 мм.
Электроконтактные датчики включают по схемам «С силовым контактом» или «С сетевым контактом». По первой схеме контакты датчика подключают непосредственно к исполнительному звену или реле, по второй—датчик включают в цепь сетки радиолампы, а исполнительный орган или реле в анодную цепь лампы. Такое включение дает возможность подобрать параметры цепей так, чтобы получить наивыгоднейший режим работы как контактов датчика, так и контактов исполнительного звена.
- простота и прочность конструкции, отсутствие скользящих контактов;
- возможность подключения к источникам промышленной частоты;
- относительно большая выходная мощность (до десятков Ватт);
- значительная чувствительность.
точность работы зависит от стабильности питающего напряжения по частоте;
возможна работа только на переменном токе.
Можно пользоваться также бесконтактным методом иамерения, при этом одной из пластин конденсатора служит сама измеряемая деталь. Бесконтактный метод находит ограниченное применение. Емкостные датчики работают только с двумя типами преобразующих электросхем. В первом типе датчик включают в мостовую схему (одно плечо). При изменении емкости плеча в диагонали моста возникает напряжение разбаланса, приводящее в действие сервосистему, осуществляющую нулевой баланс моста. Во втором типе схем при изменении емкости меняется частота генератора, по которой можно судить о размере детали.
Достоинство емкостных датчиков — широкий предел изменений емкости в зависимости от хода штока; большая точность измерения (порядка долей микрометра); малые измерительные усилия на штоке. Датчики питаются токами высокой частоты, для чего требуются громоздкие установки и тщательное наблюдение ввиду непостоянства характеристики ламп генератора.
Пневматические размерные датчики. Они обладают высокой точностью при широком диапазоне измерений, возможностью дистанционного измерения, что позволяет помещать измерительный орган в труднодоступные места измерять малые отверстия и осуществлять бесконтактные измерения. Пневматические датчики и приборы вместе с другими видами датчиков и устройств образуют» системы, контролирующие сумму или разность двух размеров, необходимых для измерения правильности геометрической формы. Воздух для питания пневмодатчиков должен иметь постоянное давление и быть очищен от включений и влаги, для этого в пневмосистеме имеются фильтры и стабилизаторы.

рис.7.12
Если размер детали 7 превзойдет расчетное значение, то давление в правой части камеры станет больше, чем в левой, и мембрана прогнется, замыкая контакты 4 и 5. Клапан 5 служит для регулировки давления при настройке датчика.
Фотоэлектрические размерные датчики. Основаны на использовании световой энергии луча света, который, попадая на цезиевый или сурьмяно-цезиевый экран фотоэлемента 4, выбивает из него электроны (рис. 7.13,а). В стеклянной колбе с цоколями 1 и 3 помещен анод 2 в виде кольца.

рис.7.13
Электроны, выбиваемые из экрана 4, притягиваются к аноду, в цепи которого возникает ток, усиливающийся в усилителе и направляемый к исполнительному звену.
В настоящее время созданы полупроводниковые фотосопротивления на основе германия, сернистого серебра, сульфида кадмия, селенида кадмия и других, обладающие большой чувствительностью, значительной допустимой мощностью рассеяния при малых габаритах и позволяющие управлять электроцепями мощностью в несколько ватт.
В фотоэлектрическом размерном датчике, показанном на рис. 7.13, б, световой поток от источника света 1 через щель перегородки падает на фотоэлемент 2. Измерительный шток 3, перемещаясь, полностью или частично перекрывает световую щель. При изменении интенсивности освещенности фотоэлемента изменяется и величина тока в нем, и при достижении тока определенной величины подается команда исполнительному механизму.
Фотоэлементы могут быть включены в электросхему «на светлую», когда анодный ток усилительной электронной лампы возрастает при увеличении светового потока, и «на темную», когда увеличение анодного тока соответствует уменьшению светового потока. К недостаткам фотоэлектрических устройств относится: необходимость в усилителях из-за малой мощности фотоэлементов; уменьшение чувствительности (старение) фотоэлемента при эксплуатации вследствие повышения температуры свыше 40° С, неравномерности освещенности и др.

Рис Дифференциальный сильфонный пневмоэлектроконтактный датчик
Принцип действия пневмоэлектроконтактного
датчика основан на измерении давления воздуха, выходящего в зазор между
калибром и поверхностью контролируемой детали. Измерения производят чаще всего
по дифференциальной схеме, которую удобно рассмотреть на примере широко
распространенного дифференциального сильфонного датчика (рис. 62). Контроль отверстия
и обрабатываемой детали 14 осуществляется с помощью пневматического
калибра пробки 15. Сжатый воздух полается от компрессора через фильтр 11 и стабилизатор давления 12 в
полости левого 2 и правого 8 сильфонов (замкнутых латунных
сосудов с гофрированными стенками). Одновременно воздух поступает к
калибру-пробке 15 и дросселю 10. Расход воздуха через дроссель 10
при определенной его настройке будет постоянным, неизменным будет и давление в левом
сильфоне.
3). Силовые датчики
Силовые датчики различных конструкций подают команду в тот момент, когда нагрузка в электросистеме, пневмосистеме, гндросистеме или в узле станка достигнет определенной, заранее заданной величины. На рис. 7.14 показан силовой датчик-реле переменного тока с электромагнитной системой. Катушка 3 с сердечником последовательно включена с обмоткой исполнительного звена на токи 5—600 А и с регулировкой тока срабатывания реле в пределах 110—350% от номинального. При значении силы тока в заданных пределах якорь 2 реле пружиной 1 отводится от сердечника и замыкает контакты, включенные последовательно с исполнительным механизмом. При перегрузке системы выше определенной величины сила тока возрастает, сердечник притягивает якорь, преодолевая действие пружины, и размыкает контакты, обесточивая исполнительное звено.
Для достижения высокой чувствительности при работе на малых давлениях применяют пневматические датчики с сильфонами, Сильфон — это гофрированная металлическая трубка, способная упруго изменять свои размеры и форму вследствие разности наружного и внутреннего давления. В применяемых конструкциях существует прямая зависимость между разностью давлений и длиной сильфона, Это свойство позволяет получать очень чувствительный силовой датчик. Наибольший ход сильфона 5—10 мм, диаметр 20— 120 мм.

Рис. 7.15. Схема пневматического сильфонного датчика (а) и
гидропневматического копировального устройства с сильфонами (б)
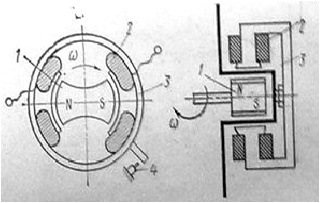
Рис. 7.16 Схема датчика типа РКС
По этому же принципу действуют скоростные датчики линейных перемещений типа ИМАШ.
