2. Основные способы включения датчиков
Вопрос 1. Основные характеристики датчиков
Выбирая датчики, надо руководствоваться следующими характеристиками:
а) видом функциональной зависимости
между изменениями входной и выходной
величин сигнала; так называемой статической характеристикой датчика;
б) чувствительностью;
в) порогом чувствительности — наименьшим
изменением входной величины, вызывающим изменение величины выходного сигнала;
г) основной погрешностью преобразования
— максимальной разностью между получаемым значением выходного сигнала и его
номинальным значением, определяемым по статической характеристике для данной
входной величины при нормальных условиях (температура окружающей среды 20±5°С,
атмосферное давление 760±20 мм рт. ст., относительная влажность 60±20%);
д) дополнительными погрешностями
преобразования — погрешностями, вызываемыми изменением внешних условий по
сравнению с их нормальными значениями. Они выражаются в процентах, отнесенных
к изменению мешающего фактора на определенную величину (например, при
изменении температуры на 10° С дается температурная погрешность в 1,6%);
Вопрос 2. Основные способы включения датчиков
Мостовые измерительные схемы применяют постоянного и переменного тока. Существуют
мостовые уравновешенные и неуравновешенные схемы. Уравновешенные мосты
требуют ручной или автоматической балансировки, в то время как неуравновешенные
мосты не требуют
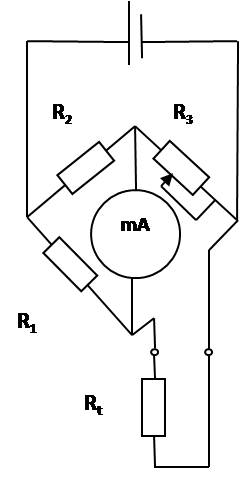
Уравновешенный
мост представляет собой схему (Рисунок 34, а), состоящую из ромба, образуемого четырьмя
сопротивлениями R1 R2, R3, Rt. Резисторы в схеме называют ветвями или плечами
моста. Помимо этого в мостовую схему включены источник тока со своим
сопротивлением Rе и измерительный прибор с сопротивлением Rnp. В
четырехугольнике также есть две диагонали, в одну из которых включен
миллиамперметр, а в другую - источник тока. Для подстройки моста одно плечо (R3)
является переменным сопротивлением.
Закон уравновешенного моста: произведение сопротивлений противолежащих плеч должны быть равны.
R1/R2=R3/Rt.или
R1·Rt=R2·R3
[2.3]
Если необходимо вычислить
неизвестное сопротивление датчика, то можно включить его в одно из плеч моста,
вместо резистора R4· и воспользоваться
формулой:
Rt=R2·R3/R1
[2.4]
Ток в диагонали моста,
содержащей измерительный прибор, через напряжение
питания:
Inp=U(R1Rt-R2R3)/M
[2.5]
Основной характеристикой любой
схемы является ее чувствительность. Она определяется как отношение приращения
тока в измерительной диагонали ∆Inp к вызвавшему его изменению сопротивления одного из плеч
моста:
Sсх =∆Inp /∆R
[2.6]
∆Inp=U∆RRt/M
[2.7]
где ∆Inp -
результирующий ток в диагонали моста, содержащей измерительный прибор, A; U - напряжение питания, В; М -
входное напряжение, В.
Неуравновешенный мост
представляет собой схему (Рисунок
34, б), состоящую из ромба, образуемого четырьмя сопротивлениями R1 R2, R3, R5, Rt. Помимо этого в мостовую схему
включены источник тока со своим сопротивлением RE и измерительный прибор с сопротивлением Rnp. Для подстройки моста одно плечо (R5) является переменным
сопротивлением.