





Тема 3.1. Общие сведения о системах приводов автоматизированного оборудования
Вопросы:
1. Типы приводов автоматизированного оборудования. Преимущества и недостатки.
2. Основные термины и определения по приводам, используемым в станках с программным управлением.
3. Особенности приводов промышленных роботов.
Автоматизированное оборудование — совокупность устройств, механизмов, приборов, посредством которых осуществляется какой-либо производственный процесс, в результате которого от человека не требуется сознательного, постоянного регулирования этого процесса.
Типы приводов автоматизированного оборудования
Электрический привод — привод (Рис.1), в котором источником механических движений в оборудовании является электрический двигатель. Система управления такого привода реализуется на элементах электроавтоматики или электроники, т. е. в системах управления используется электрическая энергия.

Рис.1. Электрический привод
При автоматизации оборудования широко используют электрический привод, который имеет существенные преимущества перед гидравлическими и пневматическими приводами. Это простота получения механических движений непосредственно из электрической энергии; удобство подведения энергии к автоматизированному оборудованию; система управления приводом не требует преобразования энергии управления в другой вид энергии. Электродвигатели изготовляют мощностью от десятых долей ватта до десятков мегаватт. Они являются основным видом двигателя в промышленности, на транспорте и в быту. Электрические двигатели в зависимости от рода тока (переменного или постоянного) и конструкции могут иметь нерегулируемую или регулируемую частоту вращения. Коэффициент полезного действия электрического привода достаточно высок (значительно выше чем гидро- или пневмоприводов).
К недостаткам электрического привода можно отнести достаточно большую инерционность и низкую напряженность рабочей среды.
Сравнительно низкая напряженность электрических двигателей и большая инерционность ротора обусловливает достаточно большие габаритные размеры этих двигателей. По этим причинам в некоторых случаях использование электрических приводов, особенно вблизи рабочего пространства исполнительных механизмов автоматизированного оборудования, становится неприемлемым. Для согласования нагрузочных и скоростных характеристик электродвигателя с нагрузочными и скоростными характеристиками исполнительных механизмов автоматизированного оборудования часто приходится использовать механические передачи.
Пневматический привод — привод (Рис.2), в котором энергия сжатого воздуха или газа пневмодвигателем преобразуется в механическую. Сжатый воздух на заводах получают от компрессоров или компрессорных станций, которые, как правило, приводятся в движение с помощью электрических двигателей. От компрессорных станций по трубопроводам сжатый воздух поступает в цехи к технологическому оборудованию. Система управления пневматическим приводом может быть пневматической или электропневматической.
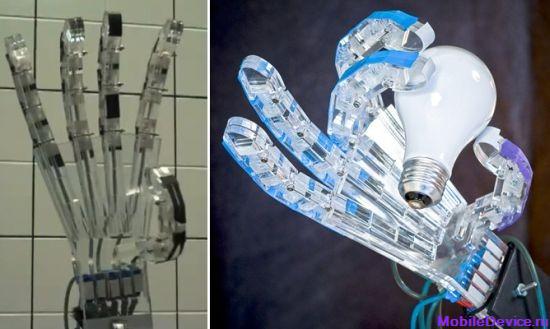
Рис.2. Пневматический привод для конечности робота
Пневматический привод широко используют для автоматизации различного технологического оборудования. Это обусловлено следующими свойствами: относительной простотой конструкции пневматических двигателей как для поступательных, так и для вращательных движений; сравнительной легкостью выбора места установки пневмодвигателей при выборе компоновочной схемы оборудования и возможностью использования принципа агрегатно-модульного построения; быстродействием, связанным с высокой скоростью срабатывания пневматических исполнительных механизмов в результате их малой инерционности при напряженности рабочей среды 0,6—1,0 МПа, т. е. такой же, как и в электрических исполнительных механизмах; надежностью работы в широком диапазоне температур; возможностью сравнительно простыми средствами обеспечить автоматизацию привода, защиту от перегрузок.
Автоматизация управления пневматическим приводом может быть реализована струйными системами управления, использующими тот же вид энергоносителя. Кроме того, достоинством пневматических приводов является простота в эксплуатации, пожаро- и взрывобезопасность, меньшая стоимость по сравнению с другими видами приводов, а при оснащении пневматическими системами управления нечувствительность к радиации и электромагнитным полям. Пневматические устройства по сравнению с гидравлическими не требуют возвратных линий и коммуникаций. Спуск воздуха из системы осуществляется непосредственно в окружающую среду.
Недостатки у пневматических приводов следующие: низкий КПД, обусловленный необходимостью предварительно механическую работу затратить для привода компрессорных или воздуходувных установок для получения соответственно сжатого или разреженного воздуха; низкие жесткостные характеристики привода в результате значительной сжимаемости воздуха или газа; низкое быстродействие пневматических систем управления по сравнению с электронными системами. Тем не менее для автоматизации оборудования многих отраслей промышленности применяют пневматические средства автоматизации.
Гидравлический привод — привод (Рис.3) , в котором для получения механической энергии используется энергия движущейся жидкости. В гидравлическом приводе насосные станции являются источником энергии жидкости, которые в движение приводятся чаще всего посредством электрических двигателей.

Рис.3. Одноковшовый экскаватор с объемным гидравлическим приводом
В приводах автомобильных машин и авиационной техники энергия для насосных станций отбирается от основного двигателя, например от двигателя внутреннего сгорания. Система управления гидравлическим приводом может быть построена на гидравлических, электрогидравли-ческих или электронногидравлических аппаратах.
Гидравлический привод в большинстве случаев имеет более низкий коэффициент полезного действия по сравнению с электромеханическим приводом, и, как весьма сложный, требует более квалифицированного обслуживания. Потери энергии в гидроприводе связаны с затратами на преодоление внутреннего трения и утечек рабочей среды через зазоры и уплотнения. Применение жидкостей с небольшой вязкостью способствует увеличению утечек, а стремление к уменьшению утечек приводит к необходимости тщательной пригонки сопрягаемых деталей гидравлических машин и аппаратов. Все это отражается на стоимости и трудоемкости изготовления этих приводов. Применяемые в качестве рабочей среды минеральные масла огнеопасны, а заменители его имеют худшую смазывающую способность. Часто неквалифицированное обслуживание приводит к загрязнению окружающей среды. Гидравлические приводы имеют напряженность рабочей среды в направлении передачи движения 6—100 МПа и допускают достаточно гибкое управление за счет регулирования потока жидкости гидравлическими устройствами, имеющими различное управление, в том числе и электронное.
Применению гидравлического привода в автоматизированном оборудовании способствуют следующие его особенности: он позволяет весьма просто осуществлять бесступенчатое регулирование частоты вращения или скорости перемещения исполнительных механизмов; местоположение источника энергии (насосной станции) во многих случаях не оказывает существенного влияния на компоновку исполнительных механизмов оборудования; компактность и малая инерционность гидравлического привода позволяют легко и быстро изменять направления движения исполнительного механизма (например, реверс гидравлического двигателя мощностью 3,75 мВт при частоте вращения 2500 мин–1 (42 с–1) может осуществиться за 0,02 с [18]); применение несложной гидравлической и электронной аппаратуры позволяет стабилизировать работу привода вне зависимости от нагрузки и температуры, а также предохранять привод от поломок при перегрузке; если в качестве рабочей среды используют минеральные масла, то детали привода работают в условиях хорошей смазки, что способствует долговечности и надежности работы привода.
Комбинированный привод — привод, в котором движение исполнительного механизма оборудования осуществляется сочетанием элементов разных типов приводов, например, пневматического и гидравлического, гидравлического и электрического, электрического и пневматического и т. п. Система управления таких приводов обычно тоже комбинированная.
Особенности приводов промышленных роботов
Разумное использование промышленных роботов в процессе автоматизации производства является одним из эффективных средств комплексной автоматизации во многих сферах народного хозяйства.

Рис.4. Роботы на сборке Solaris
Промышленные роботы эффективно используют:
- для автоматизации основных технологических операций - сборки (Рис.4), сварки (Рис.5), окраски;

Рис.5. Сварочный робот
- для автоматизации вспомогательных операций по загрузке и разгрузке различных видов технологического оборудования - прессов, машин для литья под давлением, обслуживания металлообрабатывающих станков.
Применение промышленных роботов способствует улучшению условий труда, освобождая людей от тяжелого вида работы; повышению безопасности труда, ритмичности работы оборудования и качества выпускаемой продукции; снижению трудовых затрат и загрязнения окружающей среды.
Приводы промышленных роботов должны обладать следующими особенностями:
1. приводы должны быть меньших габаритных размеров, особенно если их устанавливают на звеньях манипулятора. Уменьшение размеров и массы привода сказывается положительно на уменьшении инерционности перемещаемых звеньев манипулятора.
2. увеличение напряженности рабочей среды двигателя при одних и тех же габаритных размерах двигателя обеспечивает повышение производительности промышленного робота.
3. привод промышленного робота должен иметь такую систему управления, которая обеспечивала бы необходимую точность многократного повторения положения исполнительных механизмов промышленного робота при изменении температуры окружающей среды, температуры рабочей, среды, нагрузки и т. п., а также допустимое значение величины перехода за установленную границу в момент аварийного останова.
4. привод должен обеспечивать поддержание основных функций промышленного робота при аварийном выключении источника энергии и иметь безопасную реакцию при повторном включении энергии.
Высокую грузоподъемность промышленных роботов, возможность управления в широком диапазоне скоростей и ускорений при относительно невысоких эксплуатационных затратах обеспечивает гидравлический привод. Наибольшие скорости перемещения при ограниченной грузоподъемности обеспечивают промышленные роботы с пневматическим приводом. Применение разгрузочных конструкций промышленных роботов в сочетании с высокомоментными и высокооборотными электродвигателями способствует расширению использования электрических приводов, несмотря на сравнительно низкую напряженность.
Выпускают промышленные роботы и с механическими приводами. Их в основном применяют в тех случаях, когда не требуется частая переналадка, а грузоподъемность ограничена. Когда механизмы манипуляционной системы промышленного робота осуществляют стабильные цикловые движения, используют механические приводы возвратно-поступательного или вращательного действия с программоносителями, выполненными в виде профилированных кулачков и барабанов.
