|
Тема 2.2. Исполнительная подсистема
Вопросы:
1. Классификация исполнительных механизмов.
2. Назначение, виды, устройство и принцип работы цилиндров.
3. Уплотнения элементов гидроцилиндров
Классификация исполнительных механизмов
Исполнительные механизмы, применяемые в автоматических системах, очень разнообразны.
1. Классификация производится в первую очередь по виду энергии, создающей усилие (момент) перемещения регулирующего органа (пневматические, гидравлические и электрические, механические и комбинированные).
2. По конструкции различают электродвигательные, электронные, электромагнитные, поршневые, мембранные и комбинированные исполнительные механизмы.
В пневматических исполнительных механизмах усилие перемещения создается за счет давления сжатого воздуха на мембрану, поршень или сильфон. В гидравлических исполнительных механизмах усилие перемещения создается за счет давления жидкости на поршень (Рис.1), мембрану или лопасть.
Рис.1. Гидравлические исполнительные механизмы (гидроцилиндры)
Отдельный подкласс гидравлических исполнительных механизмов составляют исполнительные механизмы с гидромуфтами.
Пневматические и гидравлические мембранные и поршневые исполнительные механизмы подразделяются на пружинные и беспружинные. В пружинных исполнительных механизмах усилие перемещения в одном направлении создается давлением в рабочей полости исполнительного механизма, а в обратном направлении - силой упругости сжатой пружины. В беспружинных исполнительных механизмах усилие перемещения в обоих направлениях создается перепадом давления на рабочем органе механизма. По характеру движения выходного элемента большинство исполнительных механизмов подразделяются на: прямоходные (Рис.2) с поступательным движением выходного элемента, поворотные с вращательным движением до 360° (многооборотные).
Исполнительные двигатели гидравлических
приводов являются потребителями гидравлической энергии. Все гидравлические
исполнительные двигатели подразделяют на три класса: двигатели для
осуществления возвратно-поступательных движений, двигатели для осуществления
вращательных движений и двигатели для осуществления возвратно-вращательных
(качательных) движений.
Для осуществления возвратно-поступательных прямолинейных
движенийв гидроприводах применяют гидравлические силовые цилиндры
(гидроцилиндры),которые отличаются большим многообразием конструктивных схем и
исполнений. Вэтом многообразии решений можно выделить три типа конструктивных
схем, которые втой или иной форме используют во всех гидроцилиндрах:
симметричные,несимметричные и плунжерные схемы. В симметричных гидроцилиндрах рабочие площади поршня в
обеихполостях цилиндра одинаковы за счет использования двух равных по диаметру
штоков(рис.а). Их часто называют двухшточными или двухстороннего действия и
сдвухсторонним штоком. 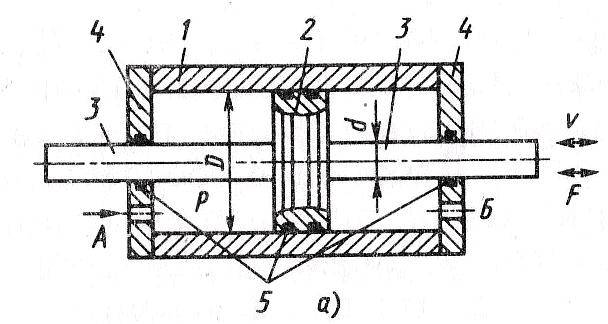
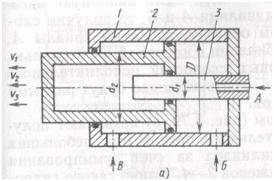
Гидроцилиндрсостоит из
собственно цилиндра (гильзы) 1, поршня 2, штоков3,крышек4иуплотнений5.Приподаче
жидкости через отверстиеАвлевую полость цилиндра она давит на поршень,
который будет двигаться вправо,вытесняя жидкость из правой полости в отверстиеБ.Приподаче жидкости в правую полость
через отверстиеБпоршеньсместится влево, вытеснив жидкость из левой
полости через отверстиеА.
Основнымипараметрами,
которые характеризуют любые гидроцилиндры, являются тяговая сила(сила, которую
может преодолеть поршень со штоком при своем движении), длинахода поршня, а
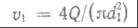
также рекомендуемая номинальная скорость движения.
Усимметричных
цилиндров тяговая сила при движении в обе стороны одинакова и безучета потерь
на трение 
гдер-давлениерабочей жидкости в полости гидроцилиндра;D—диаметр гильзы
цилиндра;d—диаметр штока;s—рабочаяплощадь поршня.
Диаметрыцилиндров и штоков, а также ход поршня при
проектировании необходимо назначать всоответствии с рекомендациямиГОСТ14063—68 Подводжидкости в полости
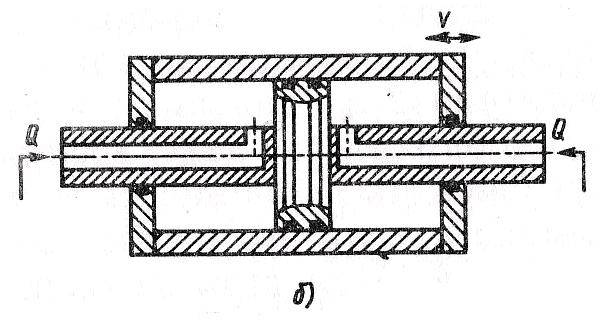
цилиндра может осуществляться не только через крышкицилиндров, как показано на
рис.а,нои другими способами,
например через каналы, выполненные в штоках (рис.б).Этотспособ очень удобен, если; при работе гидроцилиндра
движется сам цилиндр, апоршень со штоками закреплен неподвижно. На рис.в,гпоказаныспособы
подвода жидкости через отверстия в гильзе цилиндра. Может бытьиспользован и
комбинированный способ, когда жидкость подводится в одну полостьчерез крышку, а
в другую — через гильзу или шток.
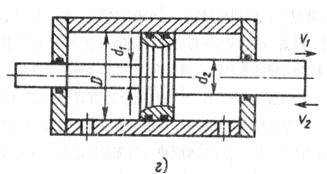
Отличатьсябудут и скорости движения поршня в ту и
другуюсторону,причем при движении влево скоростьv2будетбольше скоростиv1: 
Аналогичноенеравенство можно записать и для несимметричного
цилиндра (рис.3/г):

Несимметричныецилиндры обладают одной примечательной
особенностью: возможностью получатьбыстрые хода. Если обе полости такого
цилиндра соединить с напорной магистралью(см. рис.в),топоршень будет
двигаться вправо со скоростьюvз,преодолевая силуFз:
Иначеможно сказать, что скоростьv3исилаF3зависятот диаметра штока: чем он меньше, тем больше скоростьv3итем меньше силаF3.Этуособенность часто используют для
осуществления быстрого подвода вправо и отводавлево. Если принять, например,d=0.707D,тоv2=v3=2v1,нопри этомF1=2F2=2F3
Суммирующиегидроцилиндры(рис.а)
предназначеныдля получения нескольких разных скоростей за
счет алгебраического суммированиярабочих площадей гильзы1,поршня2иштока3.Еслиподавать
поток жидкостиQлишьна входА,аотверстияБиВсоединитьсо сливом, то
получим скорость
 Приподаче жидкости в каналБ,соединивдругие
каналы с баком, получим скорость
Приподаче жидкости в каналБ,соединивдругие
каналы с баком, получим скорость 
Еслинапорную магистраль с потокомQсоединитьс каналами А
и Б, то получим скорость 
Такимобразом, соединяя каналыА,Б,Впоследовательноили в комбинации с напорной магистралью,
можно получить несколько разныхскоростей исполнительного органа2вобе
стороны движения. Соответственно будут разными и тяговые силы такогоцилиндра.
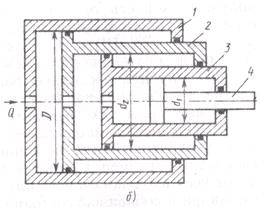
Телескопическиегидроцилиндры(рис.б)
позволяютполучить увеличенный ход исполнительного органа при
небольших габаритных вразмерах такого цилиндра за счет суммирования ходов всех
входящих в негоплунжеров2—4.Длинатакого гидроцилиндра собранном
состоянии не превышает длины корпуса 1. Приподаче жидкостиQвыдвигаетсяна всю
длину плунжер2вместесо всеми другими. Когда он упрется в крышку корпуса
1, начнет выдвигатьсяплунжер3,затемплунжер4.Числоплунжеров,
входящих друг в друга, может быть любым.
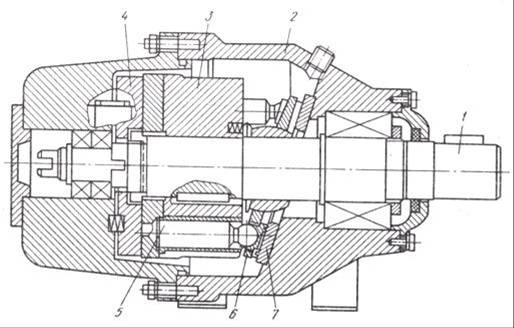
Аксиально-поршневойгидромотор
Принципдействия
аксиально-поршневых гидромоторов(рис.)состоит в следующем. При подаче жидкости
под торцы плунжеров 5 черезраспределительный диск4возникаетосевая сила,
действующаяна наклонную шайбу7.
Окружная составляющая этой силы создает крутящий момент, приводящий вовращение
ротор3вместес установленными в нем плунжерами и опорным диском6ивал1спередней
опорой в корпусе2.Такимобразом, при вращении ротора плунжеры совершают
возвратно-поступательноедвижение. Причем при движении вправо они совершают
работу, вращая ротор, а придвижении влево вытесняют жидкость из-под своих
торцов на слив.
|